Jak rychle implementovat polohovací moduly GNSS s více konstelacemi
Contributed By DigiKey's North American Editors
2021-09-09
Využití funkcí založených na poloze pomocí multi-konstelačních přijímačů globálního navigačního satelitního systému (GNSS) pro evropský systém Galileo, americký globální polohový systém (GPS), ruský GLONASS, čínský navigační satelitní systém BeiDou a japonský QZSS roste v celé řadě aplikací včetně robotiky, autonomních vozidel, průmyslové automatizace, logistiky a sledování aktiv, dronů a zemědělské a těžké stavební techniky. Mezi výhody používání multi-konstelačních přijímačů GNSS patří lepší dostupnost pozičních, navigačních, časovacích (PNT) signálů, vyšší přesnost a integrita, a vylepšená robustnost aplikace.
Vývoj multi-konstelačních přijímačů je však složitá a časově náročná činnost, která zahrnuje: optimalizaci antény v pásmu L; návrh radiofrekvenčního (RF) front-endu; integrace algoritmů zpracování signálu v základním pásmu za účelem získání, sledování a použití oprav různých signálů PNT; kódování softwaru pro zpracování aplikace k extrakci dat PNT z každého kanálu základního pásma a využití informací k implementaci funkcí systému. Konstruktéři musí také vybrat vhodnou anténu a správně ji umístit.
Alternativně se mohou konstruktéři obrátit na předem připravené moduly GNSS a vývojová prostředí, aby rychle a efektivně integrovali schopnost určování polohy do systému. Tyto moduly GNSS zahrnují RF front-end, zpracování základního pásma a vestavěný firmware pro urychlení vývoje softwaru pro zpracování aplikací. Některé moduly GNSS obsahují také antény.
Tento článek se zabývá základy GNSS, PNT a provozem přijímačů GNSS s více konstelacemi. Poté se podívá na klady a zápory integrace antén do modulů GNSS a představí několik modulů GNSS - s integrovanými anténami i bez nich - a také související vyhodnocovací desky od společností STMicroelectronics, Septentrio, aWürth Elektronik, které konstruktéři mohou využívat k účinnému a nákladově efektivnímu vývoji přesných a robustních aplikací založených na poloze.
Co jsou GNSS a PNT?
GNSS a PNT jsou úzce související pojmy. Satelity GNSS jsou nejběžnějším zdrojem PNT signálů. Satelity GNSS jsou v podstatě vysoce přesné synchronizované hodiny, které neustále vysílají své PNT informace. Modul GNSS přijímá PNT signály z daného satelitu a vypočítává jeho vzdálenost od tohoto satelitu. Pokud přijímač zná vzdálenost alespoň ke čtyřem satelitům, dokáže odhadnout svou vlastní polohu. Přesnost odhadu polohy je však ovlivněna řadou zdrojů chyb, včetně:
- Drift hodin časoměrných obvodů v satelitech GNSS.
- Nepřesnosti v predikci přesné orbitální polohy satelitů GNSS.
- Obecný drift výkonu v celkovém satelitním vybavení vzhledem k ostatním satelitům, jinak známým jako satelitní bias.
- Zkreslení a zpoždění při přenosu signálu při průchodu ionosférou a troposférou.
- Vícecestný odraz a variabilní výkon a drift v přijímači.
Pro konstruktéry jsou k dispozici různé techniky, jak opravit chyby GNSS na satelitu a v atmosféře.
Zlepšení výkonu GNSS
Nejlepší způsob, jak minimalizovat dopad chyb pocházejících z přijímače GNSS, je použít přijímač s nejvyšším výkonem, který odpovídá omezením nákladů a velikosti dané aplikace. Ale ani vysoce výkonné přijímače nejsou dokonalé; jejich výkon lze velmi pravděpodobně zlepšit. Je důležité těmto korekčním metodám porozumět, protože nabízejí různý výkon a některé moduly GNSS nejsou schopny implementovat všechny.
Pozemní referenční stanice jsou využívány pomocí několika korekčních metod GNSS (obrázek 1). Nejrozšířenějšími metodami využívání pozemních referenčních stanic k poskytování oprav GNSS přijímačům jsou Real-Time Kinematic (RTK) a Precise Point Positioning (PPP). V poslední době jsou k dispozici hybridní metody RTK-PPP.
 Obrázek 1: Uživatelský přijímač GNSS může získat informace o chybách atmosféry, hodin a oběžné dráhy z referenční sítě za účelem zlepšení přesnosti určování polohy. (Zdroj obrázku: Septentrio)
Obrázek 1: Uživatelský přijímač GNSS může získat informace o chybách atmosféry, hodin a oběžné dráhy z referenční sítě za účelem zlepšení přesnosti určování polohy. (Zdroj obrázku: Septentrio)
Metoda RTK spoléhá na jedinou základnovou stanici nebo místní referenční síť pro opravná data, která mohou eliminovat většinu chyb GNSS. Metoda RTK předpokládá, že základna a přijímač jsou blízko sebe - maximálně 40 kilometrů (km) nebo 25 mil od sebe - takže dochází ke stejným chybám. Metoda Post-Processed Kinematic neboli PPK, která je variací metody RTK, je široce využívána v průzkumu a mapování k získání vysoce přesných polohových dat nebo přesnosti na úrovni centimetrů.
Metoda PPP používá k opravám pouze chyby oběžné dráhy a satelitních hodin. Tyto chyby specifické pro satelit jsou nezávislé na místě uživatele, což omezuje počet referenčních stanic, které jsou potřeba. Metoda PPP však nezohledňuje chyby související s atmosférou, a proto má ve srovnání s metodou RTK nižší přesnost. Opravy PPP mohou mít navíc dobu inicializace přibližně 20 minut. Delší doba inicializace a nižší přesnost činí PPP nepraktickým pro mnoho aplikací.
Aplikace vyžadující přesnost téměř RTK a rychlé časy inicializace často využívají nejnovější službu korekcí GNSS RTK-PPP (někdy označovanou jako reprezentace stavového prostoru (SSR)). Používá referenční síť se stanicemi vzdálenými od sebe asi 100 km (65 mil), která shromažďuje data GNSS a vypočítává kombinaci satelitních a atmosférických korekcí. Referenční síť používá k odesílání opravných údajů předplatitelům internetové, satelitní nebo mobilní telefonní sítě. Přijímače GNSS využívající metodu RTK-PPP mohou mít přesnost subdecimetru. Volba použití korekčních metod RTK, PPP a RTK-PPP zahrnuje řadu návrhových kompromisů, které vývojáři potřebují ověřit, aby vybrali optimální řešení pro konkrétní profil aplikace. (Obrázek 2).
 Obrázek 2: Silné a slabé stránky tří běžných metod korekce GNSS. (Zdroj obrázku: Septentrio)
Obrázek 2: Silné a slabé stránky tří běžných metod korekce GNSS. (Zdroj obrázku: Septentrio)
Na regionálním základě začínají být k dispozici satelitně rozšířené systémy (SBAS), které nahradí metody korekce pozemních stanic RTK, PPP a RTK-PPP. Systémy SBAS stále využívají pozemní stanice k měření chyb GNSS, ale stanice jsou rozmístěny po celých kontinentech. Naměřené chyby jsou zpracovány na centrálním místě, kde jsou vypočítány opravy a přeneseny do geosynchronních satelitů přes pokrytou oblast. Korekční data jsou vysílána ze satelitů jako překrytí nebo rozšíření na původní data GNSS.
Přesnost GNSS závisí na dostupnosti a přesnosti satelitních měření a souvisejících oprav. Vysoce výkonné přijímače GNSS sledují signály GNSS na více frekvencích a používají více konstelací GNSS a různé metody korekcí k zajištění potřebné přesnosti a odolnosti. Výsledná redundance umožňuje stabilní výkon i v případě rušení některých satelitních měření a dat. Konstruktéři mohou zvolit různé možnosti přesnosti a redundance GNSS (obrázek 3).
 Obrázek 3: Stupně přesnosti GNSS s odpovídajícími korekčními metodami a vybranými aplikacemi. (Zdroj obrázku: Septentrio)
Obrázek 3: Stupně přesnosti GNSS s odpovídajícími korekčními metodami a vybranými aplikacemi. (Zdroj obrázku: Septentrio)
Moduly GNSS: integrované vs externí antény
Vzhledem ke složitosti umístění ve více konstelacích jsou k dispozici moduly od různých dodavatelů, které pomáhají urychlit uvedení na trh, snížit náklady a zajistit výkon. To znamená, že konstruktéři musí zvážit, zda použít interní anténu, nebo se rozhodnout pro anténu, která je umístěna mimo modul GNSS. U aplikací, kde je prioritou čas uvedení na trh a náklady, může být upřednostňována integrovaná anténa, protože je zapotřebí podstatně méně techniky. U aplikací, které vyžadují certifikaci FCC nebo CE, může schválení modulu urychlit také použití modulu s integrovanou anténou. Velikost řešení se však může zvětšit a flexibilita může být u integrovaných anténních řešení omezená.
Externí antény poskytují konstruktérům širší škálu možností výkonu a rozložení. Lze vybrat velkou vysoce výkonnou anténu nebo menší a méně výkonnou anténu. Umístění antény je navíc flexibilnější vzhledem k umístění modulu GNSS, což dále zvyšuje flexibilitu návrhu. Flexibilita umístění také umožňuje externím anténám poskytovat spolehlivější provoz GNSS. Umístění antény a směrování připojení však může být složitý a časově náročný proces a vyžaduje specifické odborné znalosti, což může potenciálně zvýšit náklady a zpomalit uvedení na trh.
Malý modul GNSS pro prostorově omezené konstrukce
Konstrukční týmy s požadovanými odbornými znalostmi v oblasti umístění a směrování antén mohou využívat multi-konstelační modul GNSS Teseo-LIV3F (GPS/Galileo/GLONASS/BeiDou/QZSS) od společnosti STMicroelectronics, který používá externí anténu (obrázek 4). Modul je dodáván v pouzdru LCC-18 o rozměrech 9,7 mm x 10,1 mm a má přesnost polohy na kružnici stejné pravděpodobnosti (CEP) 1,5 metru (m) s časem do první opravy (TTFF) pro studený, resp. horký start méně než 32 sekund (s), resp. 1,5 s (GPS, GLONASS). V pohotovostním režimu má spotřebu 17 mikrowattů (µW) a sledovací spotřebu 75 miliwattů (mW).
 Obrázek 4: Modul Tesco-LIV3F GNSS obsahuje jádro a subsystémy GNSS společně s veškerou požadovanou konektivitou a správou napájení v pouzdru o rozměrech 9,7 x 10,1 mm. Vyžaduje externí anténu. (Zdroj obrázku, STMicroelectronics)
Obrázek 4: Modul Tesco-LIV3F GNSS obsahuje jádro a subsystémy GNSS společně s veškerou požadovanou konektivitou a správou napájení v pouzdru o rozměrech 9,7 x 10,1 mm. Vyžaduje externí anténu. (Zdroj obrázku, STMicroelectronics)
Integrovaný 26megahertzový (MHz), teplotně kompenzovaný krystalový oscilátor (TCXO) Tesco-LIV3F pomáhá zajistit vysokou přesnost a vyhrazený oscilátor hodin reálného času (RTC) s frekvencí 32 kilohertzů (kHz) umožňuje zkrácení doby do první opravy (TTFF). Funkce, jako je protokolování dat, sedmidenní autonomní asistovaný GNSS, rekonfigurovatelnost firmwaru (FW) a upgrady FW, jsou k dispozici díky vestavěné 16megabitové (Mbit) flash paměti.
Mezi aplikace vhodné pro Tesco-LIV3F patří pojištění, logistika, drony, mýtné, systémy proti krádeži, lokalizace osob a zvířat, sledování vozidel a nouzová volání.
Jako předem certifikované řešení může použití modulu Teseo-LIV3F vést ke zkrácení doby uvedení konečné aplikace na trh. Modul má rozsah provozních teplot od -40 °C do +85 °C.
Pro experimentování s modulem a urychlení vývoje aplikací mohou konstruktéři využít vyhodnocovací desku AEK-COM-GNSST31. Při použití ve spojení s firmwarem X-CUBE-GNSS1 může vyhodnocovací balíček podporovat získávání, sledování, navigaci a výstup dat bez externí paměti. Tato vyhodnocovací deska (EVB) je navržena také pro použití s mikrokontrolérem SPC5 pro vývoj automobilových aplikací.
Modul GNSS se zmírněním interference
Multi-konstelační přijímač GNSS 410322 mosaic-X5 od společnosti Septentrio je nízkoenergetický modul pro povrchovou montáž o rozměrech 31 mm x 31 mm x 4 mm, který poskytuje konstruktérům řadu rozhraní, včetně čtyř UART, Ethernet, USB, SDIO a dvou uživatelsky programovatelných rozhraní GPIO.
Modul mosaic-X5 navržený pro použití v robotice, autonomních systémech a dalších masových aplikacích, nabízí rychlost aktualizace 100 Hz, latenci pod 10 milisekund (ms) a vertikální, resp. horizontální přesnost polohování RTK 0,6 cm, resp. 1 cm. Tento modul může sledovat všechny konstelace GNSS, podporuje současné i budoucí signály a je kompatibilní s korekcemi PPP, SSR, RTK a SBAS. Doba TTFF modulu je pod 45 s pro studený start a pod 20 s pro teplý start.
Modul mosaic-X5 je vybaven několika patentovanými technologiemi společnosti Septentrio, včetně AIM+, integrované technologie pro zmírnění interferencí, která potlačuje různé rušivé signály, od jednoduchých souvislých úzkopásmových signálů až po složité širokopásmové a pulzní rušičky.
Rozhraní, příkazy a datové zprávy modulů jsou plně zdokumentovány. Přiložený software RxTools umožňuje konfiguraci a monitorování přijímače, jakoý i protokolování a analýzu dat.
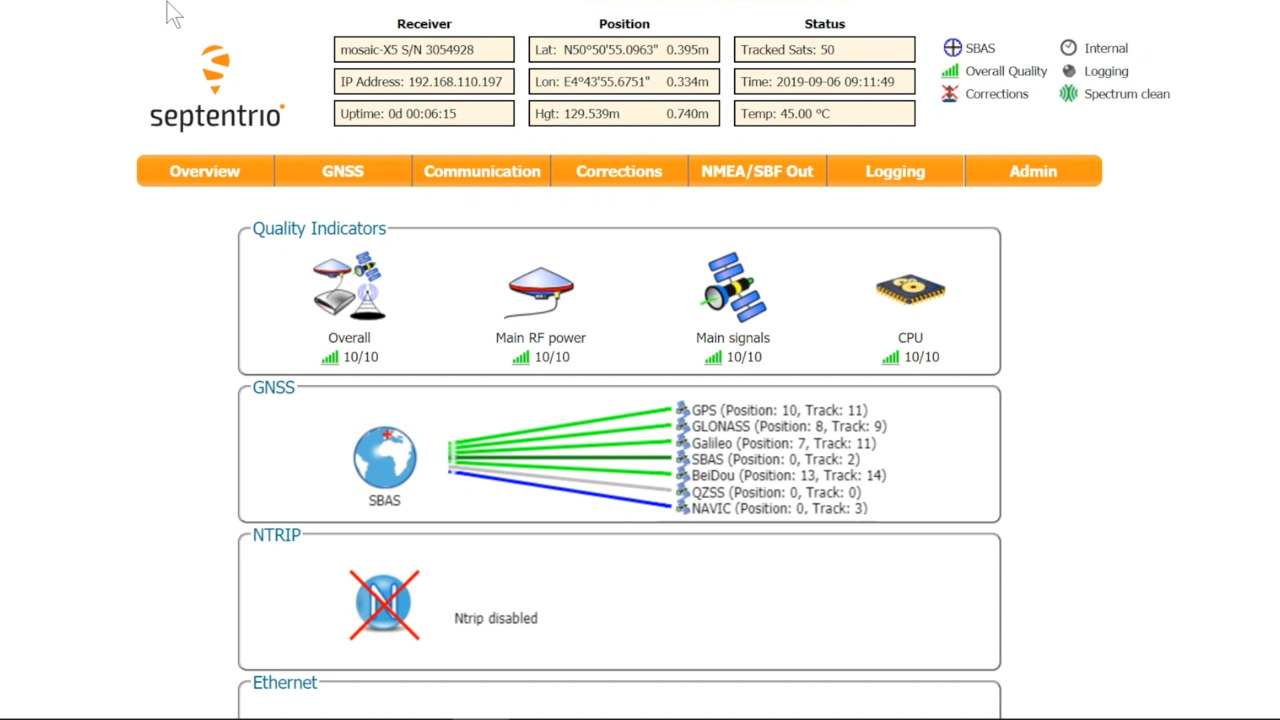
Vývojová sada mosaic-X5 410331P3161 od společnosti Septentrio umožňuje konstruktérům prozkoumávat, vyhodnocovat a vyvíjet prototypy, které plně využívají možností modulu mosaic-X5 (obrázek 5).
 Obrázek 5: Konstruktéři mohou vytvořit prototyp pomocí vývojové sady 410331P3161 mosaic-X5 s použitím různých připojení, včetně Ethernetu, portů COM nebo USB 2.0, nebo paměťové karty SD. (Zdroj obrázku: Septentrio)
Obrázek 5: Konstruktéři mohou vytvořit prototyp pomocí vývojové sady 410331P3161 mosaic-X5 s použitím různých připojení, včetně Ethernetu, portů COM nebo USB 2.0, nebo paměťové karty SD. (Zdroj obrázku: Septentrio)
Sada používá intuitivní webové uživatelské rozhraní modulu mosaic-X5 pro snadnou obsluhu a monitorování, což umožňuje konstruktérům ovládat modul přijímače z jakéhokoli mobilního zařízení nebo počítače. Webové rozhraní monitoruje provoz přijímače pomocí snadno čitelných indikátorů kvality.
Konstruktéři mohou vytvořit prototyp integrací mozaikové vývojové sady pomocí některého z následujících připojení: Ethernet, porty COM, USB 2.0, paměťová karta SD.
GNSS modul s integrovanou anténou
Pro návrháře aplikací, které mohou těžit z použití modulu GNSS s integrovanou anténou, nabízí Würth Elektronik2614011037000 Modul Erinome-I s vysoce výkonným systémem na čipu (SoC) (obrázek 6). Modul podporuje souhvězdí GPS, GLONASS, Galileo a BeiDou GNSS a je dodáván s integrovanou anténou nahoře, která zjednodušuje integraci hardwaru a zkracuje dobu uvedení na trh. Modul včetně integrované antény měří 18 mm x 18 mm.
 Obrázek 6: 2614011037000 Erinome-I je kompletní modul GNSS s vysoce výkonným GNSS SoC a integrovanou anténou. (Zdroj obrázku: Würth Elektronik)
Obrázek 6: 2614011037000 Erinome-I je kompletní modul GNSS s vysoce výkonným GNSS SoC a integrovanou anténou. (Zdroj obrázku: Würth Elektronik)
Součástí modulu jsou také TCXO, RF filtr, nízkošumový zesilovač (LNA) a sériová flash paměť.
Společnost Würth také nabízí vyhodnocovací desku (EVB) 2614019037001 pro Erinome-I (obrázek 7). Deska EVB může také sloužit jako referenční návrh pro integraci modulu GNSS do aplikace. Pro připojení desky EVB k počítači lze použít USB port. Vícepinový konektor poskytuje konstruktérům přístup ke všem pinům modulu GNSS.
 Obrázek 7: Vyhodnocovací deska 2614019037001 pro Erinome-I (blízko středu desky, s integrovanou anténou viditelnou ve středu modulu) plní také úlohu referenčního návrhu. (Zdroj obrázku: Würth Elektronik)
Obrázek 7: Vyhodnocovací deska 2614019037001 pro Erinome-I (blízko středu desky, s integrovanou anténou viditelnou ve středu modulu) plní také úlohu referenčního návrhu. (Zdroj obrázku: Würth Elektronik)
Navigační a satelitní software Würth Elektronik (WENSS) je jednoduchý počítačový nástroj pro interakci s modulem Erinome-I GNSS pomocí rozhraní UART. Podpora:
- Řízení provozu EVB
- Obousměrná komunikace s modulem Erinome-I
- Vyhodnocení funkcí a schopností Erinome-I
- Seznámení s protokoly, větami a příkazy Erinome-I
- Konfigurace Erinome-I bez znalosti protokolů
- Analýza vět a příkazů používaných Erinome-I
WENSS umožňuje snadné vyhodnocení polohovacích aplikací bez pokročilých znalostí. Zkušení vývojáři mohou také používat software WENSS pro pokročilejší konfigurace.
Závěr
Přesných a spolehlivých polohovacích schopností lze nejlépe dosáhnout pomocí více konstelací se související podporou technologie korekce. Jedná se o složité systémy, ale konstruktéři mohou využívat připravené moduly GNSS, související vývojové sady a prostředí k rychlému a efektivnímu porovnání možností a implementaci funkcí a služeb založených na poloze.
Doporučeno k přečtení
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.