Jak mohou malé a střední podniky využít průmyslový Metaverse k rychlému průzkumu a nasazování robotických řešení
Contributed By DigiKey's North American Editors
2024-11-21
Roboti a kolaborativní roboti (coboti) zaujímají přední postavení v oblasti technologií automatizace továren. Digitální dvojčata a virtuální realita (VR) zaujímají přední postavení v oblasti konstrukčních a vývojových nástrojů. Společně je lze využívat k vytváření průmyslového Metaverse, který rychleji poskytuje vyšší produktivitu, a to i pro malé a střední podniky (SME).
Konstruktéři v malých a středních podnicích mohou využívat výhod jednoduchého a intuitivního rozhraní kombinujícího digitální dvojče, tedy vysoce podrobný virtuální model fyzického objektu, například delta, lineárního nebo víceosého robota, a 3rozměrné (3D) prostředí VR umožňující přímé spouštění a kontrolu pohybových sekvencí robota.
Používání těchto funkcí podporuje jemné doladění a optimalizaci automatizačního systému i bez jakéhokoli fyzického hardwaru a umožňuje rychlý průzkum více možností řešení.
Tento článek nejprve shrnuje rozdíl mezi matematickým, datově popsaným digitálním dvojčetem a vizuálním digitálním dvojčetem (VR twin) a potřebnost obou těchto modelů k vytváření průmyslového Metaverse. Poté představuje robotický řídicí systém a související software od společnosti Igus které lze využívat k simulaci robota na 3D rozhraní (vizuální digitální dvojče) bez použití jakéhokoli fyzického hardwaru, společně s kompatibilními delta, lineárními a víceosými roboty, které lze využívat k realizaci optimalizovaného řešení.
Digitální dvojčata a VR jsou doplňkové technologie využívající různé formy vizualizace, interakce a hardwaru. Digitální dvojčata jsou datové modely fyzických objektů, systémů nebo procesů. Jsou navržena tak, aby mohla být používána po celý životní cyklus modelovaného předmětu od počátečního konceptu až po vyřazení z provozu a recyklaci.
VR je pohlcující, vizuálně založená technologie, která také využívá digitální modely. V prostředí VR lze simulovat vztahy a interakce mezi objekty, například robota plnicího úkol. Takže zatímco obě technologie lze používat pro návrh a simulaci, technologie digitálního dvojčete se zaměřuje na zohlednění celého životního cyklu a VR se zaměřuje na interakce mezi fyzickými objekty.
Metaverse kombinuje digitální dvojčata a VR do účelově vytvořeného virtuálního prostředí podporujícího interakce mezi digitálními objekty a lidmi v reálném čase. Často je spojován s hraním her, ale stále více se používá v obchodních a průmyslových aktivitách.
Vítejte v prostředí iguverse
Společnost Igus vyvinula aplikaci metaverse iguverse na podporu inženýrských interakcí v průmyslových prostředích, jako je vývoj a nasazování robotických systémů. Aplikaci iguverse lze implementovat prostřednictvím softwaru Igus Robot Control (iRC). Tato bezplatná aplikace bez licence umožňuje uživatelům ovládat různé typy robotů, včetně delta robotů, cobotů (robotických ramen) a portálových robotů.
Poskytuje uživatelům 3D rozhraní a více než 100 ukázkových programů. Systémové požadavky pro implementaci softwaru iRC zahrnují počítač (minimálně CPU Intel i5) se systémem Windows 10 nebo 11 (64 bitů), 500 MB volného místa na disku a připojením k síti Ethernet nebo k bezdrátové síti.
Jádrem softwaru je 3D digitální dvojče programovaného robota. Příkladem je model tříosého lineárního portálového robota DLE-RG-0001-AC-500-500-100 s pracovním prostorem 500 x 500 x 100 mm nebo dvouosý model aktuátoru xy DLE-LG-0012-AC-800-500 s pracovním prostorem 800 x 500 mm (obrázek 1). Konstruktéři mohou definovat pohyby jen několika kliknutími myší a pomocí 3D modelu zajistit, aby požadované pohyby jsou proveditelné, a to ještě před zakoupením robota.
 Obrázek 1: příklad 3D VR digitálního dvojčete tříosého portálového robota v aplikaci iguverse. (Zdroj obrázku: Igus)
Obrázek 1: příklad 3D VR digitálního dvojčete tříosého portálového robota v aplikaci iguverse. (Zdroj obrázku: Igus)
Kromě softwaru iRC je klíčovým prvkem vývojového prostředí iguverse řídicí jednotka robota. Například jednotka IRC-LG12-02000 určená pro motory 48 V používá sedm vstupů, sedm výstupů a je opatřena10m kabelem pro připojení k robotu. Řídicí jednotky IRC obsahují moduly pohonu pro různé velikosti bipolárních krokových motorů a jsou k dispozici jako konfigurovatelné nebo předkonfigurované. Tyto jednotky jsou též opatřeny několika rozhraními pro integraci systému včetně následujících:
- Rozhraní programovatelného logického automatu (PLC) pro ovládání přes digitální vstupy a výstupy, určené zejména pro snadné spouštění a zastavování programů pomocí automatu PLC nebo tlačítka
- Rozhraní Modbus TCP pro ovládání přes automat PLC nebo počítač
- Ethernetové rozhraní CRI (Common Robotic Interface) pro ovládání a konfiguraci přes automat PLC nebo počítač
- Rozhraní robotického operačního systému (ROS) pro ovládání robota pomocí ROS
- Rozhraní pro kamery pro detekci objektů
- Cloudové rozhraní pro vzdálené sledování stavu robota
Podporovaná kinematika
V prostředí iguverse jsou podporovány různé kinematiky (základní pohyby), které definují řízený pohyb robota. Kromě předkonfigurované kinematiky lze v softwaru IRC konfigurovat až tři další kinematicky nezávislé osy. Předkonfigurovaná kinematika zahrnuje:
- 2osé a 3osé delta roboty
- Portálové roboty,
- 2osé (osa X a Y)
- 2osé (osa Y a Z)
- 3osé (osa X, Y a Z)
- Robotická ramena (coboty),
- 3osé (osa 1, 2, 3)
- 3osé (osa 2, 3, 4)
- 4osé (osa 1, 2, 3, 4)
- 4osé (osa 2, 3, 4, 5)
- 5osé (osa 1 až 5)
- 6osé (osa 1 až 6)
- 4osého robota SCARA
Snadné programování pro nízkonákladovou automatizaci
Roboti a řídicí jednotky IRC od společnosti Igus jsou navrženy tak, aby podporovaly nízkonákladovou automatizaci. Takové řešení nebylo možné bez snadno použitelného programovacího rozhraní. 3tlačítková myš nebo gamepad jsou schopné pohybovat robotem a umisťovat jej v prostředí iguverse. Pomocí softwaru IRC může uživatel volně pohybovat všemi osami digitálního dvojčete v 3D rozhraní. Funkce učení podporuje vývoj softwaru na ovládání robota, a to i bez připojení fyzického robota.
Pokud chce uživatel implementovat učení, manuálně přesune virtuálního robota do požadované polohy a definuje způsob jeho pohybu. Proces se opakuje, dokud není vytvořen úplný profil pohybu. Centrum nástrojů v softwaru IRC umožňuje uživatelům přidávat odpovídající koncové efektory, například chapadla, a provádět snadné a automatické nastavování středového bodu nástroje na robotovi. Dále lze přidat připojení k průmyslovému řídicímu systému vyšší úrovně.
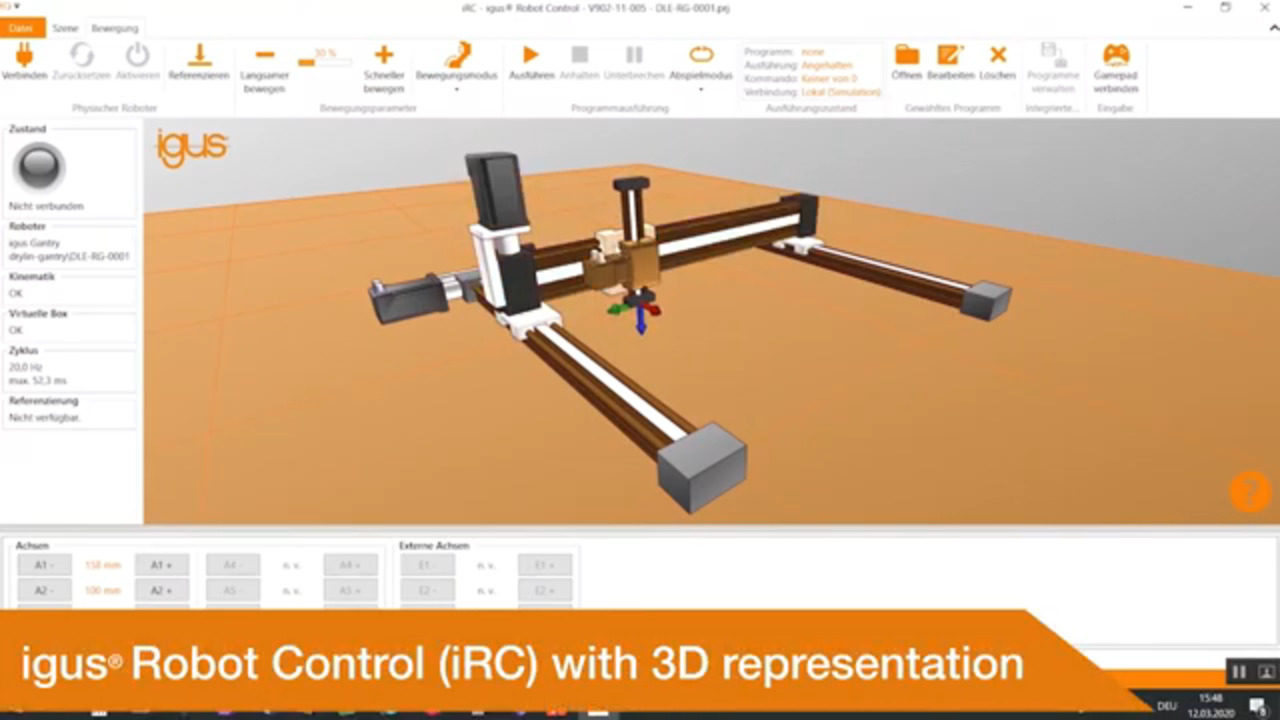
Proces začíná aktivací robota pomocí tlačítek „připojit“, „resetovat“ a „povolit“ podle potřeby v rozhraní. Stavový LED indikátor na jednotce IRC by se měl rozsvítit zeleně a stav by měl sdělovat „No Error“. Pohybový profil lze nyní zadat pomocí karty „Jogging“ (obrázek 2).
 in the iguverse immersive development environment (click to enlarge)") Obrázek 2: pomocí karty „Jogging“ (vlevo dole) v pohlcujícím vývojovém prostředí iguverse lze zadávat pohybové profily. (Zdroj obrázku: Igus)
Obrázek 2: pomocí karty „Jogging“ (vlevo dole) v pohlcujícím vývojovém prostředí iguverse lze zadávat pohybové profily. (Zdroj obrázku: Igus)
Portáloví roboti
Portáloví roboti, jako jsou ti uvedení v předchozích příkladech platformy iguverse, se skládají ze dvou základních os X, osy Y a volitelné osy Z. Osa Y je připojena ke dvěma rovnoběžným osám X a pohybuje se tam a zpět ve dvourozměrném prostoru. Volitelná osa Z podporuje třetí rozměr pohybu.
Portáloví roboti od společnosti Igus používají samomazné plastové vložky, které klouzají a odvalují se hladčeji a tišeji než tradiční konstrukce založené na kuličkových ložiscích. Nový konstrukce je lehčí, odolná proti korozi a bezúdržbová, což jsou důležité vlastnosti pro malé a střední podniky. Pro malé a střední podniky má též zásadní význam skutečnost, že tito roboti jsou cena až 40 % levnější než tradiční portáloví roboti, čímž poskytují rychlejší návratnost investic (ROI).
Tito roboti jsou vhodní pro dvě třídy aplikací: nízké rychlosti s vysokým zatížením nebo vysoké rychlosti s nízkým zatížením. Reprezentativní aplikace zahrnují balení, vychystávání, štíkování, manipulaci s materiálem a montážní operace.
Jsou nabízeny v řadě velikostí. Dostupné příslušenství zahrnuje spojky, koncové efektory a příruby motorů. Příklady středně velkých portálových robotů zahrnují:
- Model DLE-FG-0006-AC-650-650 je dvourozměrný plochý portál s pracovní plochou 650 x 650 mm. Tento robot podporuje užitečné zatížení až 8 kg a nabízí dynamickou rychlost až 20 vychystávání za minutu.
- Model DLE-RG-0012-AC-800-800-500 je trojrozměrný portál s pracovní plochou 800 x 800 x 500 mm. Tento robot podporuje užitečné zatížení až 10 kg s dynamickou rychlostí až 20 vychystávání za minutu.
Dovednost paletizace
Paletizace produktů pro expedici je každodenní činností ve výrobních a logistických provozech. Nejnovějším a největším členem platformy iguverse je velký portálový robot XXL s pracovním prostorem 2000 x 2000 x 1500 mm vhodný pro paletizační aplikace do 10 kg. K dispozici jsou konstrukce na míru s pracovním prostorem až 6000 x 6000 x 1500 mm.
Tito portáloví roboti jsou schopní odebírat díly o hmotnosti až 10 kg, přepravovat je rychlostí až 500 mm/s a ukládat je na paletu s opakovatelností 0,8 mm (obrázek 3). Řešení s paletizačním robotem od společnosti Igus stojí až o 60 % méně než srovnatelné systémy.
 Obrázek 3: paletizaci, která je běžnou a důležitou činností ve výrobních a logistických provozech, lze automatizovat pomocí portálového robota. (Zdroj obrázku: Igus)
Obrázek 3: paletizaci, která je běžnou a důležitou činností ve výrobních a logistických provozech, lze automatizovat pomocí portálového robota. (Zdroj obrázku: Igus)
Delta roboti
Stejně jako portáloví roboti jsou i delta roboti k dispozici se dvěma nebo třemi osami. Delta roboti používají pracovní obálku ve tvaru kopule namontovanou nad pracovním prostorem. Tito roboti vykazují výjimečně vysoké rychlosti a často se používají k manipulaci s materiálem a umísťování dílů. Příklady delta robotů od společnosti Igus zahrnují:
- Robot RBTX-IGUS-0047 používá tříosou konstrukci s pracovním prostorem o průměru 660 mm. Robot nabízí přesnost ±0,5 mm, maximální užitečné zatížení 5 kg, maximální rychlost 0,7 m/s a schopnost provádět až 30 vychystávání za minutu. (Obrázek 4).
- Robot RBTX-IGUS-0059 používá 2osou konstrukci s pracovním prostorem o průměru 700 mm. Nabízí rovněž přesnost ±0,5 mm. Robot nabízí maximální užitečné zatížení 5 kg, maximální rychlost 2 m/s a schopnost provádět až 50 vychystávání za minutu.
 Obrázek 4: příklad tříosého delta robota vedle jednotky Igus iRC (vlevo). (Zdroj obrázku: DigiKey)
Obrázek 4: příklad tříosého delta robota vedle jednotky Igus iRC (vlevo). (Zdroj obrázku: DigiKey)
Coboti s kloubovým ramenem
Prostředí iguverse podporuje také coboty s kloubovým ramenem. Coboti mohou používat od dvou do 10 nebo více os, které se též nazývají stupně volnosti (DOF). Obecně mají velké pracovní obálky a ve spolupráci s osobou jsou schopní provádět složité úkoly. Model REBEL-6DOF-02, resp. REBEL-4DOF-02 od společnosti Igus používá 6, rep. 4 DOF. Oba coboti vykazují přesnost ±1 mm, jmenovitý pracovní rozsah 400 mm a schopnost provádět minimálně 7 vychystávání za minutu s lineární rychlostí 200 mm/s.
Model používající 6 DOF nabízí maximální užitečné zatížení 2 kg a maximální dosah 664 mm. Model používající 4 DOF nabízí maximální užitečné zatížení 3 kg a maximální dosah 495 mm (obrázek 5).
 and 6 DOF (right)") Obrázek 5: coboti s kloubovým ramenem se 4 DOF (vlevo) a 6 DOF (vpravo). (Zdroj obrázku: Igus)
Obrázek 5: coboti s kloubovým ramenem se 4 DOF (vlevo) a 6 DOF (vpravo). (Zdroj obrázku: Igus)
Shrnutí
Kombinací digitálních dvojčat a VR poskytuje pohlcující průmyslový Metaverse v prostředí iguverse nástroje, které umožňují rychlý vývoj a nasazování robotických řešení. Tento Metaverse je zdarma, bez licencí a navržen tak, aby pracoval lokálně v počítači bez připojení ke cloudu. Lze jej používat k vývoji a testování robotických řešení bez přítomnosti robota.
Metaverse podporuje širokou škálu kinematických řešení v delta robotech, portálových robotech, robotických ramenech (cobotech) a robotech SCARA. Řídicí jednotka IRC obsahuje celou řadu rozhraní pro podporu potřeb automatizace a provozu, včetně rozhraní pro automaty PLC, rozhraní Modbus TCP/IP, CRI Ethernet, ROS, rozhraní pro kamery detekce objektů a cloudového rozhraní. Prostředí Iguverse, jednotka iRC a související roboti od společnosti Igus byli optimalizováni tak, aby podporovali potřeby malých a středních podniků v oblasti nízkonákladové automatizace.
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.