Snižte obavy z dojezdu elektrických vozidel a zvyšte bezpečnost pomocí integrovaného řízení motoru FOC a pokročilých senzorů
Contributed By DigiKey's North American Editors
2022-01-05
Konstruktéři systémů elektrických vozidel (EV) a hybridních elektrických vozidel (HEV) (často označovaných jako xEV) jsou pod neustálým tlakem, aby zajistili ujetí více kilometrů na jedno nabití, aby snížili obavy z dojezdu a snížili uhlíkovou stopu vozidla. Zároveň potřebují přidat další motory, senzory, související elektroniku, procesory a software, aby dosáhli vyšší úrovně autonomie vozidla, uživatelských funkcí a bezpečnosti a přitom snížili náklady.
Motory pro dveře, okna, bateriové chladicí ventilátory, ventilátory chladiče a čerpadla a další funkce jsou obzvláště ožehavým problémem, protože nejen zvyšují hmotnost, ale vyžadují také pokročilé řídicí algoritmy, jako je vektorové řízení (FOC), aby se minimalizoval hluk a spotřeba energie a zároveň zajistila plynulá odezva. Celkový úkol návrhu systému je komplikován potřebou splnit také požadavky normy ISO 26262 na funkční bezpečnost a normy AEC-Q100 na kvalitu.
K tomu, aby se konstruktéři mohli těmto výzvám postavit, mohou využít řadu zařízení s kvalifikací pro automobilový průmysl, která poskytují vyšší úrovně hardwaru a softwaru, zjednodušují návrh a integraci různých funkcí a zároveň snižují počet dílů a celkovou stopu.
Tento článek pojednává o problémech, kterým čelí konstruktéři EV a HEV. Poté si zde představíme a ukážeme, jak k nastartování efektivního návrhu motoru EV/HEV používat vysoce integrovanou řídicí jednotku FOC bezkartáčového stejnosměrného motoru (BLDC) a související vyhodnocovací desku. Představíme si zde také různé senzory pro monitorování proudu, 3D polohy, rychlosti a směru, vše z jednoho zdroje – od společnosti Allegro MicroSystems.
Problémy EV s náklady, bezpečností a dojezdem
Problémů, které musí konstruktéři xEV řešit, je mnoho, včetně nákladů na vozidlo, bezpečnosti a spolehlivosti – zejména s ohledem na zvyšující se úroveň autonomie vozidla, dojezdu na jedno nabití (obavy z dojezdu) a životnosti bateriových bloků.
K podpoře bezpečnosti a spolehlivosti jsou zapotřebí pokročilé senzory, které splňují požadavky funkcí pokročilých asistenčních systémů pro řidiče (ADAS), jak jsou definovány v normě ISO 26262. Kvůli nákladům a dojezdu začali konstruktéři používat napájecí sběrnice s vyšším napětím až 800 V pro vyšší účinnost a nižší hmotnost kabelu a zároveň využili vylepšení v konstrukci bateriových bloků.
Například lepší regulace teploty baterie přispěla k delšímu dojezdu a delší životnosti baterie, zatímco vylepšené chlazení trakčních invertorů EV a HEV pomáhá zvýšit hustotu výkonu a energie a snížit hmotnost.
Zatímco vyšší úrovně integrace polovodičových zařízení umožňují větší funkčnost s menší hmotností a prostorem, motory BLDC potřebné pro nutné chladicí ventilátory musí být přísně řízeny, aby se optimalizovala účinnost. K dosažení tohoto cíle je užitečné do hradlového budiče řídicí jednotky motoru zahrnout pokročilé algoritmy řízení motoru, jako je FOC.
Vysoce výkonné chlazení
FOC umožňuje plynulý provoz elektromotorů v celém jejich rozsahu otáček a dokáže při spuštění generovat plný točivý moment. Kromě toho může FOC zajistit rychlé a plynulé zrychlení a zpomalení motoru, což je funkce, která je užitečná pro přesné ovládání ve vysoce výkonných aplikacích pohybu. FOC lze použít k vývoji vysoce účinných, kompaktních a tichých nízkonapěťových (LV) (50 V DC a méně) budičů pro řadu vysoce výkonných motorů BLDC až do 500 W. Ty se obvykle používají v chladicích ventilátorech vysokonapěťových (HV) baterií xEV, stejně jako v dmychadlech systémů vytápění, větrání a klimatizace (HVAC) a kapalinových čerpadlech pro chladicí systémy trakčních invertorů HV (obrázek 1).
") Obrázek 1: Řídicí jednotky motoru FOC mohou využívat LV napájení baterie k chlazení HV baterií a HV trakčních invertorů xEV. (Zdroj obrázku: společnost Allegro MicroSystems)
Obrázek 1: Řídicí jednotky motoru FOC mohou využívat LV napájení baterie k chlazení HV baterií a HV trakčních invertorů xEV. (Zdroj obrázku: společnost Allegro MicroSystems)
V konvenčních konstrukcích je FOC implementováno s externími senzory pomocí mikrokontroléru. Tyto konstrukce, nazývané přímé FOC, mohou být složité a mají tendenci trpět sníženou dynamickou odezvou kvůli jejich závislosti na externích senzorech při měření provozních parametrů motoru.
FOC se zlepšeným výkonem a nižšími náklady je možné dosáhnout odstraněním externích senzorů.
Informace z chybějících senzorů jsou však stále potřebné k implementaci FOC a lze je získat z napětí a proudů na svorkách motoru ze zpětné elektromotorické síly (BEMF) ve vinutí motoru. Zatímco hardware je jednodušší, implementace bezsenzorového FOC vyžaduje složitější řídicí software.
Bezsenzorový algoritmus FOC umožňuje nejvyšší účinnost a dynamickou odezvu při minimalizaci akustického hluku. Když je motor v klidu a když nejsou k dispozici žádné informace o BEMF, poskytuje také robustní spouštění s otevřenou smyčkou.
Snadné FOC pro automobilové chladicí ventilátory a čerpadla
Zatímco většina budičů FOC BLDC vyžaduje, aby vývojáři softwaru napsali a přenesli algoritmus do mikroprocesoru nebo mikrokontroléru, model A89307KETSR-J od společnosti Allegro MicroSystems integruje bezsenzorový algoritmus FOC přímo do hradlového budiče. S pouze pěti externími pasivními součástkami (čtyři kondenzátory a jeden rezistor) minimalizuje budič A89307KETSR-J také kusovník (BOM), zlepšuje spolehlivost a snižuje složitost návrhu (obrázek 2).
") Obrázek 2: Typický aplikační obvod chladicího ventilátoru bateriového bloku xEV budiče A89307KETSR-J ukazuje pět externích součástek: čtyři kondenzátory a jeden rezistor. (Zdroj obrázku: společnost Allegro MicroSystems)
Obrázek 2: Typický aplikační obvod chladicího ventilátoru bateriového bloku xEV budiče A89307KETSR-J ukazuje pět externích součástek: čtyři kondenzátory a jeden rezistor. (Zdroj obrázku: společnost Allegro MicroSystems)
Hradlový budič A89307KETSR-J funguje od 5,5 do 50 V DC. Integrovaný algoritmus FOC zahrnuje konstantní točivý moment a konstantní výkon stejně jako provozní režimy s otevřenou smyčkou a konstantní rychlostí. Model A89307KETSR-J obsahuje vstupy pro pulzně-šířkovou modulaci (PWM) nebo řízení rychlosti taktovacího režimu, brzdění a směr a výstupní signály pro poruchové stavy a otáčky motoru (obrázek 3).
") Obrázek 3: Vnitřní blokové schéma budiče A89307KETSR-J ukazuje řídicí jednotku FOC (uprostřed), vstupy pro PWM nebo řízení rychlosti taktovacího režimu (SPD), brzdy (BRAKE) a směr (DIR) (vlevo) a výstupy pro poruchu (FAULT) a rychlost motoru (FG) (rovněž vlevo). (Obrázek: společnost Allegro MicroSystems)
Obrázek 3: Vnitřní blokové schéma budiče A89307KETSR-J ukazuje řídicí jednotku FOC (uprostřed), vstupy pro PWM nebo řízení rychlosti taktovacího režimu (SPD), brzdy (BRAKE) a směr (DIR) (vlevo) a výstupy pro poruchu (FAULT) a rychlost motoru (FG) (rovněž vlevo). (Obrázek: společnost Allegro MicroSystems)
Budič A89307KETSR-J je optimalizován pro řízení externích N-kanálových výkonových tranzistorů MOSFET s nízkým odporem při zapnutí. Dokáže dodávat velké špičkové budicí proudy potřebné k rychlému „zapnutí“ a „vypnutí“ tranzistorů MOSFET, aby se minimalizovaly výkonové ztráty během přepínání, zlepšila se provozní účinnost a omezily se problémy s regulací tepla. K dispozici je více úrovní hradlového budiče, což konstruktérům umožňuje optimalizovat kompromis mezi emisemi elektromagnetického rušení (EMI) a účinností. Rychlé zapínání tranzistorů MOSFET snižuje spínací ztráty, ale zvyšuje EMI, zatímco pomalejší zapínání tranzistorů MOSFET snižuje EMI, přičemž cenou za to jsou zvýšené spínací ztráty a nižší účinnost.
Otáčky motoru lze ovládat pomocí vstupu PWM, analogového vstupu nebo vstupu CLOCK. Možností je regulace rychlosti v uzavřené smyčce s programovatelným poměrem otáček za minutu (RPM) k taktovací frekvenci. Bezsenzorové řízení spouštění zahrnuje detekci a synchronizaci předběžného otáčení vpřed a vzad (otáčení), což budiči A89307KETSR-J umožňuje pracovat v širokém rozsahu konfigurací motoru a zátěže.
Výkon při spouštění zlepšuje také algoritmus spouštění bez zpětného chodu společnosti Allegro MicroSystems. Motor se po zapnutí spustí ve správném směru bez zpětných vibrací nebo chvění. Funkce Soft-On-Soft-Off (jemné zapnutí, jemné vypnutí) postupně zvyšuje proud do motoru příkazem zapnutí (stav otáčení) a postupně snižuje proud z motoru příkazem vypnutí, čímž dále snižuje akustický hluk (obrázek 4).
 Obrázek 4: Křivky proudu budiče A89307KETSR-J pro jemné zapnutí (nahoře) a jemné vypnutí (dole) mají za následek hladký chod motoru a snížený akustický hluk. (Zdroj obrázku: společnost Allegro MicroSystems)
Obrázek 4: Křivky proudu budiče A89307KETSR-J pro jemné zapnutí (nahoře) a jemné vypnutí (dole) mají za následek hladký chod motoru a snížený akustický hluk. (Zdroj obrázku: společnost Allegro MicroSystems)
Budič A89307KETSR-J obsahuje rozhraní I2C pro nastavení jmenovitého proudu motoru, napětí, rychlosti, odporu a profilu spouštění. Rozhraní I2C také implementuje zapínání/vypínání a řízení rychlosti stejně jako zpětnou vazbu rychlosti a poruchové signály.
Bezsenzorová vyhodnocovací deska FOC
K urychlení vývoje motorových pohonů BLDC založených na FOC využívajících budič A89307KETSR-J mohou konstruktéři použít vyhodnocovací desku APEK89307KET-01-T-DK a související software (obrázek 5). Tato deska obsahuje budič A89307KETSR-J s přístupem ke všem vstupním a výstupním pinům plus kompletní třífázový výkonový stupeň pro pohon motoru BLDC. Konstruktéři mohou zvolit parametry pohonu FOC pomocí jednoduchého grafického uživatelského rozhraní (GUI) a nahrát je do paměti EEPROM na čipu. Minimální požadavky na kusovník budiče A89307KETSR-J umožňují návrh pohonů, které se vejdou do krytu motoru, což velikost řešení dále snižuje.
 Obrázek 5: Vyhodnocovací deska APEK89307KET-01-T-DK obsahuje budič A89307KETSR-J (U1, levá strana uprostřed na desce) a šest výkonových tranzistorů MOSFET (pravá strana) pro pohon motoru BLDC. (Zdroj obrázku: společnost Allegro MicroSystems)
Obrázek 5: Vyhodnocovací deska APEK89307KET-01-T-DK obsahuje budič A89307KETSR-J (U1, levá strana uprostřed na desce) a šest výkonových tranzistorů MOSFET (pravá strana) pro pohon motoru BLDC. (Zdroj obrázku: společnost Allegro MicroSystems)
Senzory pro systém ADAS
Konstruktéři systémů xEV potřebují snímat úrovně proudu v motorových pohonech, DC-DC převodnících a invertorech, stejně jako rotační polohy škrticích ventilů a válců a rychlost a směr převodů v převodovkách, aby byly funkce systému ADAS kompaktní a nákladově efektivní. Společnost Allegro MicroSystems nabízí řadu senzorových řešení pro systémy ADAS včetně:
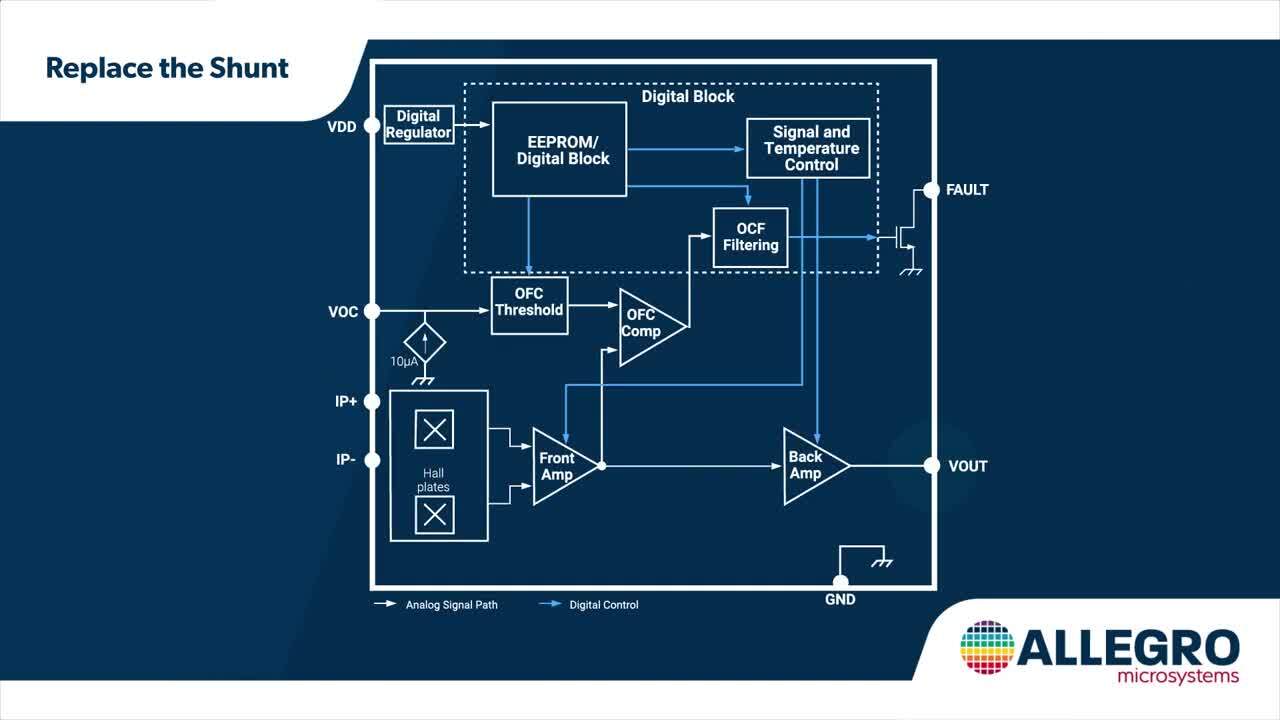
Snímání proudu: Model ACS72981KLRATR-150B3 poskytuje konstruktérům ekonomické a přesné snímání střídavého nebo stejnosměrného proudu. Tento vysoce přesný lineární snímač proudu s Hallovým efektem má šířku pásma 250 kHz a je navržen pro použití při řízení motoru, řízení převodníku DC-DC, řízení invertoru a detekci a řízení zátěže. Jedná se o integrovaný obvod s kvalifikací AEC-Q100 a má dobu odezvy <2 µs, což u aplikací kritických z hlediska bezpečnosti podporuje potřeby rychlé detekce nadproudových chyb.
3D snímání polohy: Bezkontaktní lineární a rotační 3D magnetické snímání polohy pro detekci polohy škrticí klapky, ventilu, válce a převodovky lze rychle implementovat pomocí integrovaného obvodu 3DMAG A31315LOLATR-XY-S-SE-10 společnosti Allegro MicroSystems. Zařízení může měřit rotační pohyb v horizontální a vertikální rovině a měřit lineární pohyb ze strany na stranu nebo zepředu dozadu (obrázek 6).
 Obrázek 6: 3D snímač polohy A31315LOLATR-XY-S-SE-10 může měřit rotační pohyb v horizontální a vertikální rovině a měřit lineární pohyb ze strany na stranu nebo zepředu dozadu. (Zdroj obrázku: společnost Allegro MicroSystems)
Obrázek 6: 3D snímač polohy A31315LOLATR-XY-S-SE-10 může měřit rotační pohyb v horizontální a vertikální rovině a měřit lineární pohyb ze strany na stranu nebo zepředu dozadu. (Zdroj obrázku: společnost Allegro MicroSystems)
Snímač A31315LOLATR-XY-S-SE-10 nabízí konstruktérům volbu mezi výstupními formáty – poměrovým analogovým, PWM nebo protokolem SENT (Single Edge Nibble Transmission) SAE J2716. Byl vyvinut tak, aby v automobilových systémech souvisejících s bezpečností splňoval normy ISO 26262 ASIL B (jedna matrice, v balení SOIC-8) a ASIL D (redundantní duální matrice, v balení TSSOP-14).
Rychlost a směr: Model ATS19520LSNBTN-RSWHPYU je diferenciální snímač rychlosti převodovky a směru ozubených kol s Hallovým efektem tolerantní k vibracím. Dostupné jsou modely pro snímání směru vpřed a vzad (obrázek 7).
 Obrázek 7: Zobrazená varianta „F“ modelu ATS19520 měří rotaci vpřed, když zub ozubeného kola přechází z pinu 1 na pin 3 (nahoře), a zpětné otáčení, když zub ozubeného kola přechází z pinu 3 na pin 1 (dole). Varianta „R“ měří rotaci v opačných směrech. (Zdroj obrázku: společnost Allegro MicroSystems)
Obrázek 7: Zobrazená varianta „F“ modelu ATS19520 měří rotaci vpřed, když zub ozubeného kola přechází z pinu 1 na pin 3 (nahoře), a zpětné otáčení, když zub ozubeného kola přechází z pinu 3 na pin 1 (dole). Varianta „R“ měří rotaci v opačných směrech. (Zdroj obrázku: společnost Allegro MicroSystems)
Senzor s hodnocením B normy ISO 26262 ASIL má integrovanou diagnostiku a je vhodný pro použití v pohonech xEV. Třípinový balíček SIP („Single-in-line Package“) obsahuje integrovaný zadní magnet s předpětím pro měření rychlosti a směru rotujících železných cílů a integrovaný kondenzátor k zajištění elektromagnetické kompatibility.
Závěr
Integrované bezsenzorové motorové pohony FOC BLDC spolu se snímači proudu, magnetickými snímači polohy a snímači rotace jsou klíčovými komponentami umožňujícími navrhovat efektivní a bezpečné xEV s delším dojezdem a nižší uhlíkovou stopou. Zejména použití motorových pohonů FOC umožňuje navrhovat účinnější a tišší chladicí systémy s vylepšenou dynamickou odezvou pro bateriové sady a trakční invertory. Kompaktní, přesné a energeticky účinné senzory jsou naopak zásadní pro vývoj xEV, které splňují požadavky na spolehlivost pokročilých asistenčních systémů pro řidiče a požadavky na funkční bezpečnost podle normy ISO 26262.
Doporučeno k přečtení
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.